農薬散布ドローンは、単に「リモコンで飛ぶおもちゃ」ではなく、4つのプロペラを毎秒数百回制御しながら、GNSS衛星の電波で自分の位置をセンチメートル単位で把握している精密機械です。本記事では、ドローンがどのように浮き、動き、そして正確な位置を知るのかを、現場のオペレーターが知っておきたい範囲で解説します。
農薬散布ドローンの飛行原理 - プロペラ・GNSS・RTKの仕組み

目次
プロペラの回転方向と反動の打ち消し
ドローンの仕組みで、まず押さえておきたいのがプロペラの回転方向です。
マルチコプター型のドローンでは、隣り合うプロペラが互いに逆方向へ回転するように配置されています。右回りと左回りが交互に並んでいるのです。
モーターがプロペラを回すと、その反動で機体自体が逆方向へ回ろうとする力(反トルク)が発生します。隣り合うプロペラを逆回転にすることで、この反動を互いに打ち消し合い、機体の姿勢を安定させています。
もしすべてのプロペラが同じ方向に回っていたら、反動が全部同じ方向に溜まってしまい、機体が勝手にクルクル回ってしまいます。シングルローターのヘリコプターがテールローターを必要とするのも同じ理由です。

上昇・下降・旋回の原理
上昇・下降は「プロペラの回転数」で決まる
プロペラは回転することで空気を下に押し出し、その反作用として上向きの力=揚力を生み出します。
- プロペラの回転数を上げる → 揚力が増える → 重力に勝って上昇
- プロペラの回転数を下げる → 揚力が減る → 重力に引かれて下降
仕組みはとてもシンプルです。4つのプロペラすべての回転数を一律に上げ下げすれば、機体はまっすぐ上下します。
旋回は「反動の打ち消しをわざと崩す」ことで行う
旋回の仕組みは少しトリッキーです。先ほど「隣り合うプロペラの逆回転で反動を打ち消している」と説明しましたが、旋回するときはこの打ち消しのバランスをわざと崩します。
たとえば、右回りのプロペラ2つの回転数を上げ、左回りの2つを下げると、右回り側の反動が大きくなって打ち消しきれず、機体全体に回転する力が生まれます。これで機体が向きを変える(ヨー制御)、という仕組みです。
前後左右の移動は「機体を傾ける」ことで生まれる
前進・後退や左右への移動も、やはりプロペラの回転数の制御で行います。
前に進みたい場合、後ろ側のプロペラの回転数を上げます。すると後ろ側の揚力が増えて機体が前方へ傾きます。傾いた揚力のベクトルには前向きの成分が含まれるので、機体はその方向へ移動するわけです。
4つのプロペラの回転数のバランスだけで、上昇・下降・旋回・前後左右の移動をすべてコントロールしています。これをコンピュータが毎秒数百回という速さで自動調整しているのが、現代ドローンの凄さです。
ドローンの姿勢を安定させる4つのセンサー
ここまで「プロペラの回転数を制御して飛ぶ」という話をしましたが、では機体の傾きや位置はどうやって把握しているのでしょうか? 鍵になるのが複数のセンサーです。
代表的なものとして、DJIの「Phantom4」には以下のようなセンサーが搭載されています。
- 超音波センサー:地面との距離を測る(低空時の高度安定)
- 赤外線センサー:障害物との距離を検知
- カメラによる物体認識:周囲の物体をビジョンで把握
- GNSS:衛星電波で現在位置を特定
これらの複合的な情報を元に、ドローンは自分の姿勢と位置をリアルタイムで把握し、適切なプロペラ制御を行っています。
GNSS - ドローンはどうやって自分の位置を知るのか
「GPS」は数あるGNSSのひとつ
GNSSは Global Navigation Satellite System(全球測位衛星システム)の略で、人工衛星を使って地球上の位置を測る仕組みの総称です。
「GPS」という言葉を日常的に使いますが、GPSはあくまでアメリカが運用している1システムの名前で、世界には6つのGNSSがあります。
| 名称 | 運用国 | 衛星数(目安) |
|---|---|---|
| GPS | アメリカ | 31機 |
| GLONASS | ロシア | 24機 |
| Galileo | EU | 30機 |
| BeiDou | 中国 | 35機 |
| QZSS(みちびき) | 日本 | 4機 |
| IRNSS | インド | 7機 |
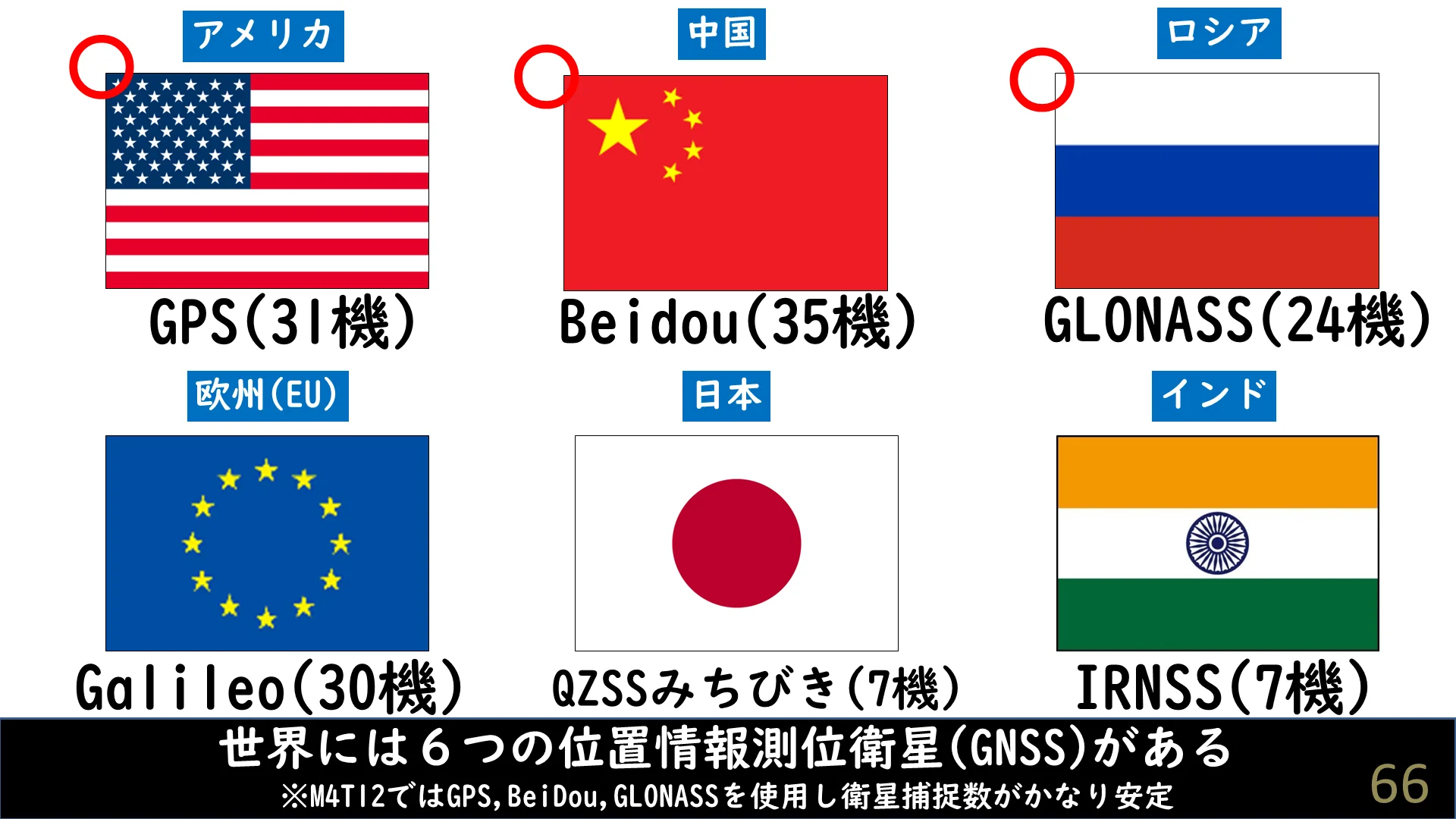
ドローンは複数のGNSSから同時に信号を受信することで、使える衛星数を増やし、位置精度を向上させています。たとえばDJIの農業ドローン M4T12 は、GPS・BeiDou・GLONASSの3つを使用しており、衛星捕捉数が非常に安定しています。
位置の計算方法 - 電波の到達時間から距離を割り出す
GNSSが位置を特定する原理は意外とシンプルです。
- 衛星から発信された電波には「いつ送ったか」という時刻情報が載っている
- ドローンが受信した時刻との差で、電波が届くまでの時間(伝搬時間)が分かる
- 伝搬時間 × 光の速さ(秒速約30万km)= 衛星までの距離
たとえば、ある衛星からの電波が届くまでに0.1秒かかったとすると、距離は約3万kmと計算できます。
三角測量 - なぜ「衛星3つ以上」で位置が決まるのか
衛星までの距離が分かっても、それだけでは位置は特定できません。距離を中心に球を描くイメージです。
- 衛星1つ → 距離は分かっても方向が不明
- 衛星2つ → 候補が円状に残る
- 衛星3つ → 3つの球が重なる一点に絞り込める
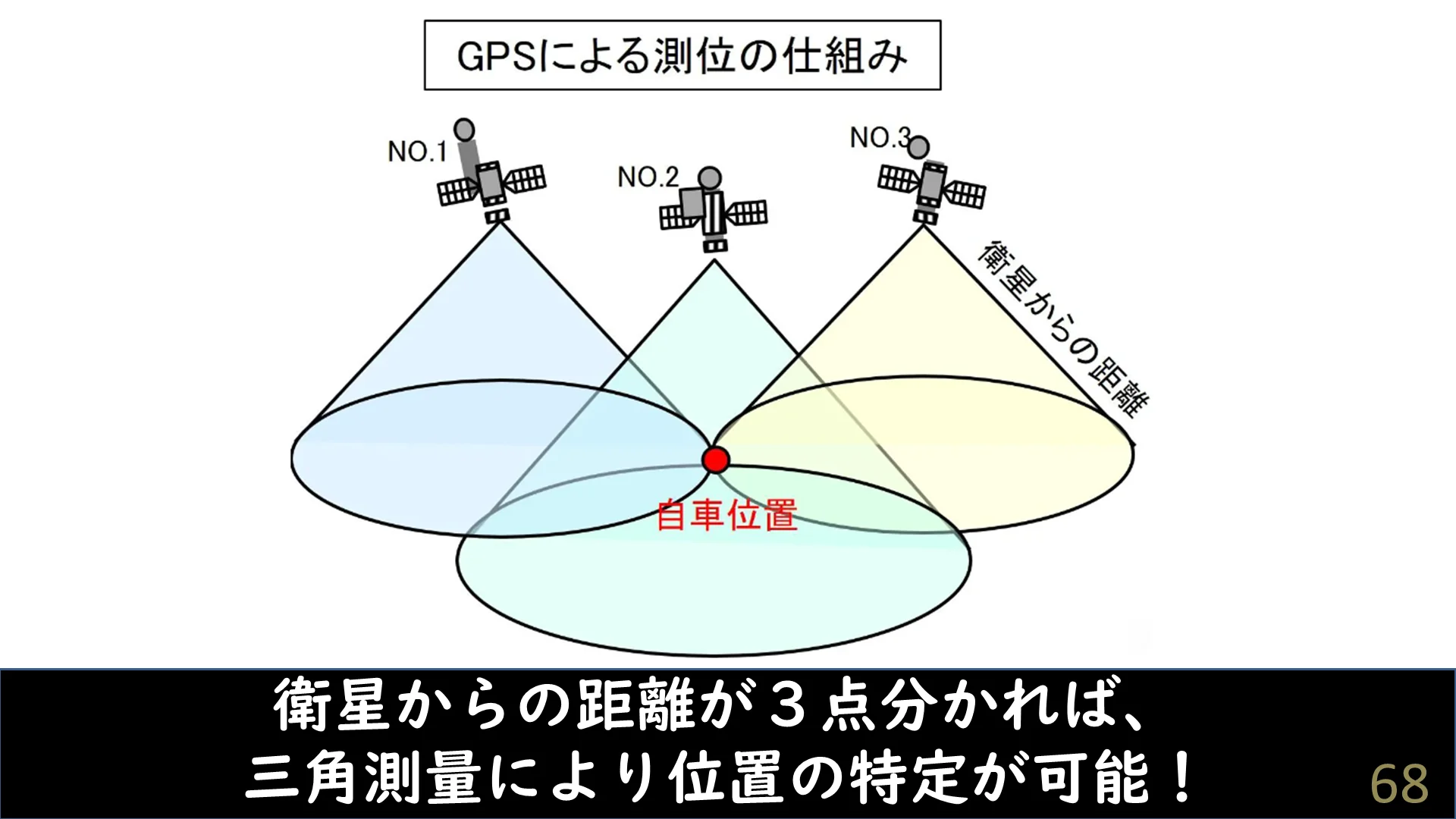
衛星を多く捕まえるほど精度が上がるのは、この三角測量の冗長性が効くためです。先述の「GPS + BeiDou + GLONASSの3つを同時使用」は、衛星数を稼ぐための現実解なわけです。
GNSSの誤差 - なぜズレるのか
GNSSも万能ではなく、誤差が発生します。主な原因は2つあります。
1. 捕捉できる衛星の数・配置が悪い
山間部やビル街など、空が遮られる環境では受信できる衛星が減り、精度が落ちます。また、衛星の数だけでなく配置も重要です。衛星が空の一箇所に偏っているとき(マルチパス環境)は、三角測量の精度が悪化します。空全体にバランスよく衛星が散らばっているほうが精度は出ます。
2. 大気(電離層・対流圏)の影響
衛星からの電波は宇宙から地上に届くまでに、以下の層を通過します。
- 電離層:電気を帯びた層。電波の速度がわずかに変わる
- 対流圏:水蒸気や気圧の影響がある層。電波が屈折する
それぞれで電波の速度・経路がわずかに変化するため、距離計算にズレが生じます。
一般的なGNSSでは、こうした要因で数メートル程度の誤差が発生することがあります。普通のドローン飛行なら問題ありませんが、精密な農薬散布や測量では致命的です。
RTK - センチメートル精度を実現する仕組み
数メートルの誤差を数センチまで縮めるのが RTK(Real-Time Kinematic)です。
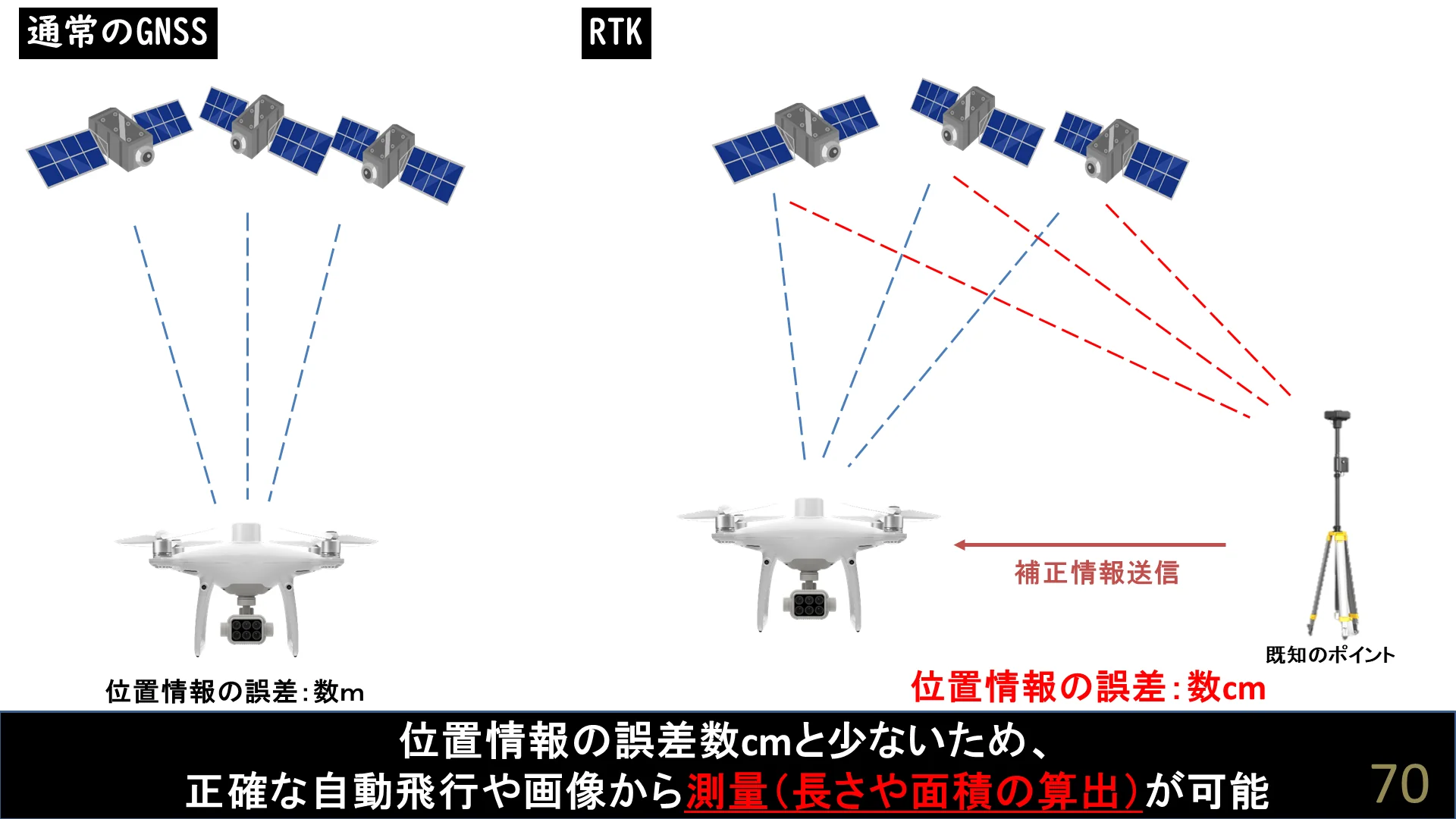
RTKの基本原理 - 「誤差は基準局も同じ」を利用
RTKは、地上に位置が正確に分かっている基準局(リファレンスステーション)を設置することが前提です。
ポイントはこうです。基準局とドローンが同じ衛星からの信号を同時に受信しているとき、電離層や対流圏による誤差は、両者でほぼ同じになります。だから基準局側で「この時刻、この衛星からの電波はこれだけズレていた」という補正情報を算出し、それをドローンにリアルタイムで送ってやれば、ドローンは自分のGNSSデータから共通誤差を差し引けます。
結果、位置精度は一気にセンチメートルレベルに上がる、というわけです。
- 通常のGNSS:誤差 数メートル
- RTK使用時:誤差 数センチ
この精度差が、畦際ぎりぎりの自動散布や、重複散布の回避を可能にしています。
RTKの流れ
- 位置が正確に分かっている基準局がGNSS信号を受信
- 「この時刻・この地点では、これだけ誤差が出ている」という補正情報を計算
- 補正情報をリアルタイムでドローンに送信
- ドローンは受信した補正情報で自分のGNSSデータを修正
このやり取りが飛行中ずっと続くので、RTK対応ドローンは飛んでいる間ずっとセンチメートル精度を維持できます。
RTK基準局を自前で持たずに済む「ichimill」
「RTKは便利そうだけど、基準局を自分で用意するの?」と思われるかもしれません。実は、基準局をサービスとして提供してくれる会社があります。
代表的なのが**ソフトバンクの「ichimill(イチミル)」**です。月額3,000円程度で、スマホのテザリング経由で補正情報をドローンに送信できます。全国どこでも使えて、自前で基準局を立てる必要がないため、手軽にセンチメートル精度が手に入ります。
ichimillを使うには、ドローン側がRTK対応機種である必要があります。農薬散布ドローンでは、DJI AgrasシリーズやXAGシリーズの一部モデルが対応しています。
まとめ - 原理を知ると、トラブル対応が変わる
本記事で解説した飛行原理を整理します。
- プロペラの回転数制御で上昇・下降・旋回・前後左右の移動が決まる
- 複数センサー(超音波・赤外線・ビジョン・GNSS)で姿勢と位置を把握
- GNSSは複数システム(GPS + BeiDou + GLONASS 等)を併用して精度を高める
- 三角測量の原理上、衛星が多く・バランスよく見える環境が有利
- RTKを使えば、大気誤差をキャンセルしてセンチメートル精度に到達できる
原理を理解していると、たとえば「山間部で急にGNSSが乱れた」「ビル影で機体がフラつく」といった現象に遭遇したときに、慌てずに対処できます。また、機体選定や周辺サービス(ichimill等)の導入判断も、技術的な裏付けを持って行えるようになります。
農薬散布ドローンは「飛ばせればOK」な道具ではありません。仕組みを理解した上で運用することが、安全で精度の高い散布に直結します。